
2025年11月26日(現地時間) – EpicGames は、フォトグラメトリソフト RealityScan 2.1 をリリースしました。
新機能ハイライト
今回のリリースでは、自動化ワークフローの強化と高度なLiDAR機能のサポートなどのアップデートが行われました。
自動化機能の強化
最新バージョンのRealityScanでは、自動化機能が大幅に向上しました。
CLIドキュメント
これに伴い、Epic Developer Communityにおいて、コマンドラインインターフェース(CLI)のリファレンス資料を含む包括的な自動化ドキュメントが公開されました。
既存のコマンドから新しいガイド、サンプル、拡張機能に至るまで、RealityScanの自動化ワークフローを習得するために必要な情報が網羅されています。
新しいテンプレートシステム
従来のレポート機能は「テンプレートシステム」として刷新されました。これにより、データ抽出や結果の整形、レポート生成が自動化され、煩雑な作業を減らしながらパイプライン全体を効率化できます。
REST / gRPCプラグインとLinuxサポート
RealityScan 2.1では、新たに「リモートコマンドプラグイン(Remote Command Plugin)」が追加され、REST や gRPC API を使ったリモート制御が可能になりました。これにより、複数のマシンに処理を分散させることができます。
さらに、Linux 環境にも対応し、Wine 上で CLI ワークフローを実行できるようになりました。コマンドラインによる自動処理が正式にサポートされています。
Epic Developer Community 上には、REST や gRPC のサーバー・クライアントを立ち上げる方法を解説したサンプルが用意されています。加えて、テンプレートシステムを使ってプロジェクトデータを JSON 形式でエクスポートし、クライアント側でモニタリングに活用する方法も紹介されています。
新しいLiDAR機能
RealityScan 2.1では、LiDAR を使ったワークフローの幅がさらに拡張されました。
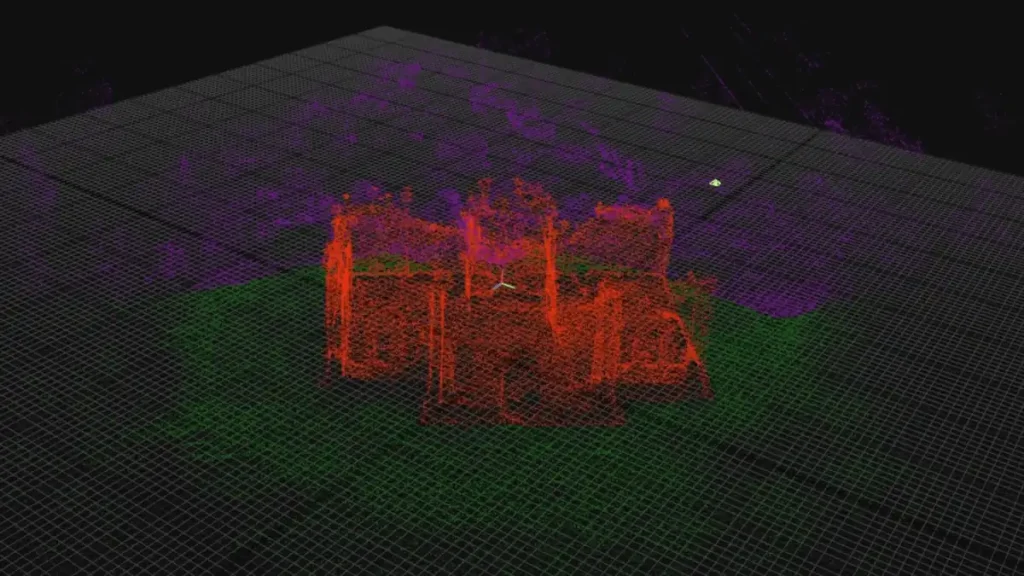
SLAMのサポート
XGrids などの SLAM(Simultaneous Localization and Mapping)スキャナーから点群データを直接インポートできるようになり、画像や軌跡、Colmap Scene を読み込んで仮想カメラを生成することが可能になりました。これにより、フォトグラメトリと LiDAR データを簡単に統合でき、より効率的な 3D キャプチャ環境を構築できます。
SLAM のメリット
SLAM データを使うことで、GPS に依存せずに未知の環境をマッピングしながら自己位置を推定できます。これにより、ライブトラッキングやカバレッジの可視化を伴う高速なデータ取得が可能となり、スキャン中に欠落したエリアを補完できます。また、フォトグラメトリでは処理が難しい表面でも、より滑らかで正確なジオメトリを生成できます。
分類済み点群のインポート
SLAMデータのインポートに加え、LASおよびLAZ形式の点群からASPRSクラスをインポートできるようになりました。
- クラス表示の制御:SCENE 3D/VIEW タブから切り替え可能
- クラス凡例の追加:1Ds ビューで確認可能
- 選択的メッシュ生成:特定のクラスのみを処理対象にすることで時間を短縮し、車や木など不要な要素を自動的に除去
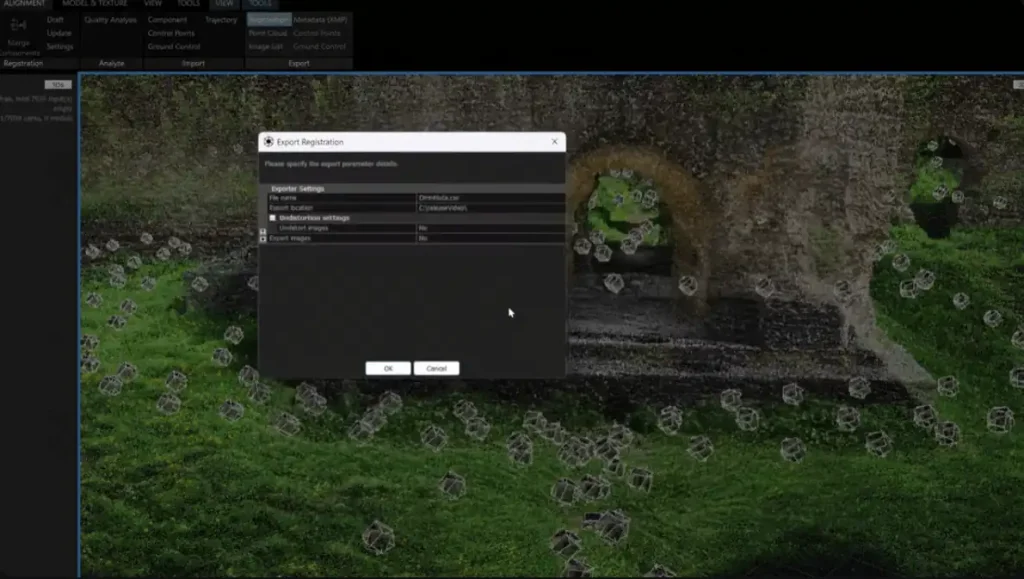
エクスポート機能の拡張
エクスポート機能がさらに強化されました。新たに OpenCV 形式でのエクスポートがサポートされ、登録オプションの幅が広がっています。加えて、XMP エクスポートが追加され、歪み補正済みの画像とオリジナル画像の両方に対応できるようになりました。
さらに、Colmap エクスポートも改善され、元の歪んだ画像と一致するファイルを出力できるようになるなど、より正確で柔軟なデータ処理が可能になっています。
レンダリング機能の強化
入力データセットのカメラ位置からモデル画像を生成できるようになり、カメラの内部・外部パラメータを正確に反映したレンダリングが可能になりました。
さらに、法線レンダリングにも対応し、カメラスペースとワールドスペースの両方で出力できるようになりました。

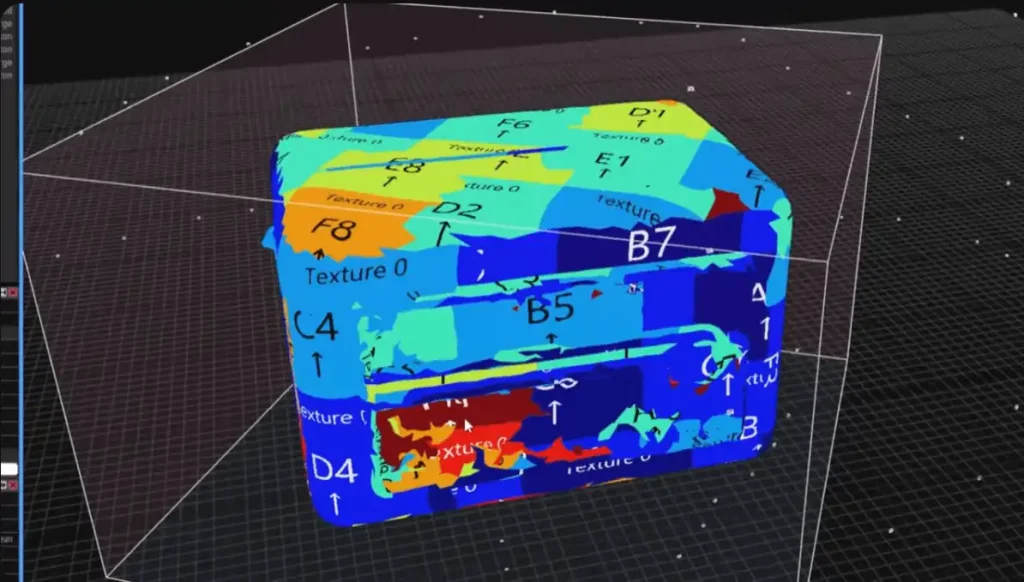
UV展開の改善
新しく導入されたカラフルなチェッカーボード表示によって、展開状態を直感的に確認できるようになり、作業の視認性が向上しています。
さらに、三角形削除のしきい値が 400 に引き上げられ、テクスチャの断片化を解消するチャートが標準で有効化されました。これにより、より高品質な UV レイアウトを効率的に作成できるようになっています。
その他
UI・操作性
- ツールの視認性向上: リボン内のツールやボタンの視認性と見つけやすさが改善されました。
- アプリ内AIモデルアップデータ: アプリケーション全体を再インストールすることなく、AIモデルをシームレスに更新できるようになり、利便性が大幅に向上しました。
データ管理・インポート機能
- フライトログの改善(Trajectory): 「Flight log」の名称が「Trajectory(軌跡)」に変更されました。インポート時のカスタムフォーマット設定が可能になり、Yaw・Pitch・Rollの順序やマウント方向の指定も可能になりまし
CLI・自動化機能
- 自動処理やスクリプト連携に役立つ、新しいエクスポート用CLIコマンドが追加されました。
exportMapsAndMasks: 深度マップ、マスク画像、法線マップのエクスポートに対応。exportCameraSnapshots: 選択したカメラ位置からのレンダリング画像のエクスポートに対応。importColmap: COLMAPプロジェクトのインポートに対応。importBundler: Bundlerプロジェクトのインポートに対応。
価格とシステム要件
Reality scan は 少なくとも 8 GB の RAM を搭載した64ビット Microsoft Windows バージョン 8 / 8.1 / 10 / 11 または Windows Server バージョン 2008+で利用することができます。
詳しいシステム要件はこちらから
RealityScanは、学生、教育関係者、個人、そして年間総売上高が100万米ドル未満の企業であれば無料で利用することができます。
100万米ドルを超える場合は1シート189,496円 / 年となります。また、Unreal Subscriptionの一部としても利用可能です。
ダウンロードは、Epic Games Launcherを通して可能です。


コメント