2026年4月7日(現地時間)- Niantic Spatial は、ビジネス向けの「Scaniverse(スキャニバース)」と、グローバルスケールで機能する測位システム「VPS 2.0」を発表しました。
開発の背景
近年、AI による世界モデル(World Models)は急速に進歩していますが、その多くはテキストや画像のみで訓練されています。一方で、実際の経済活動の大部分はデジタル画面の外で起きています。物理世界で自律システムを機能させるには、正確な座標やジオメトリを備えた「機械が読み取れる形の環境モデル」が欠かせません。
Niantic Spatial は、この課題に取り組むため、人と機械がやり取りできる「世界の生きたモデル」の基盤づくりを進めています。今回発表された Scaniverse と VPS 2.0 は、その入口となるプラットフォームとして位置づけられています。
ビジネス向けの Scaniverse
空間をキャプチャすることと、その空間内で自分がどこにいるかを正確に把握することは、本来まったく別の課題で、多くの企業はどちらか一方しか提供していません。Niantic Spatial は、この「スキャン」と「自己位置推定」の両方を統合し、幾何学的に正確なモデルを提供できる数少ない企業のひとつです。
Scaniverseは、高価な専用機材や特別なトレーニングを必要とせず、一般的なスマートフォンや市販の360度カメラを利用して、小さな部屋から数千平方メートルの広大なエリアまで、さまざまな空間のキャプチャを可能にします。
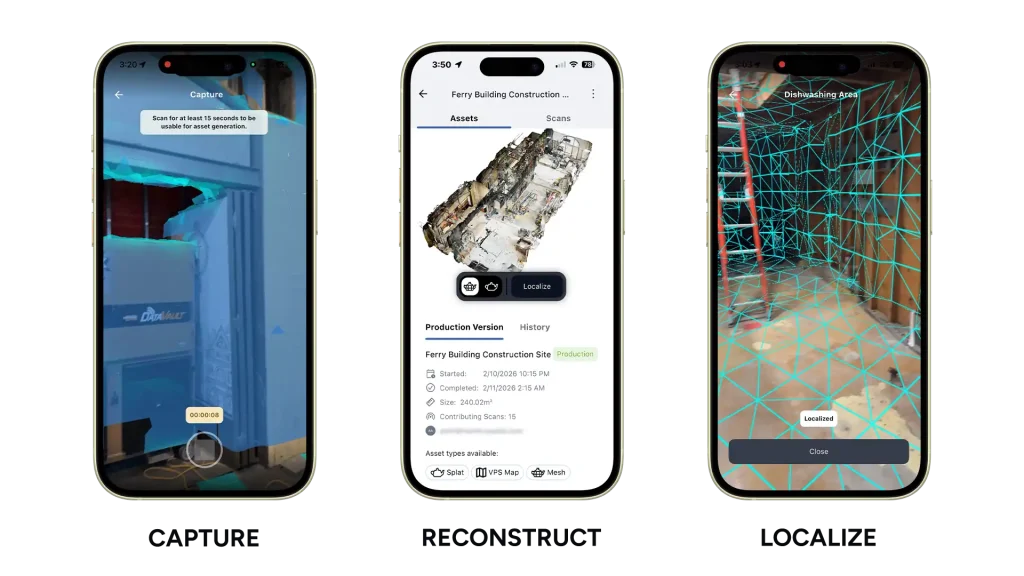
モバイルアプリでのシームレスな体験
すでに現実世界で数百万ものオブジェクトや場所をスキャンしてきた実績を持つモバイルアプリでは、今回エンタープライズ向けの機能が導入されました。
業務利用を想定した「エンタープライズビジネスアカウント」では、モバイルアプリで以下のことが可能になります。
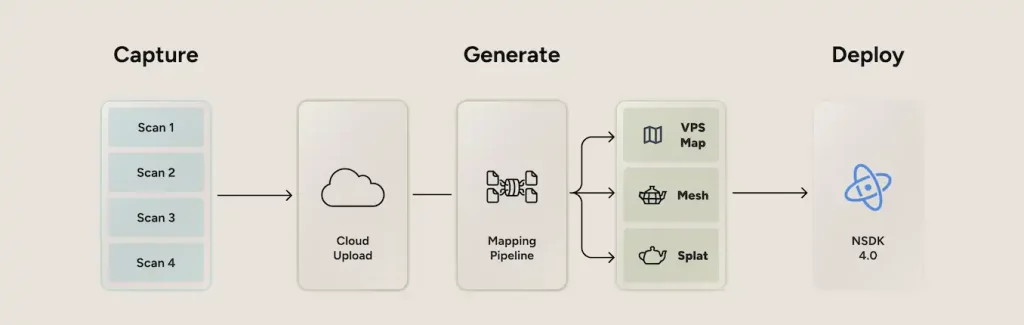
- 単一スキャンから多様な出力: アプリ上で直接、視覚ベースの測位マップ(VPSマップ)、高精細なメッシュデータ、およびGaussian Splats(ガウシアンスプラット)を生成できます。
- チームでの取得・管理とバージョン管理: 複数のユーザーや拠点が異なる時間・デバイスでキャプチャしたデータをクラウド上で処理・統合。Web経由でどこからでもアクセスでき、バージョン管理機能により物理的に変化していく現場のマップを常に最新状態に保ちます。
- オンデバイスプレビュー: 通信環境の悪い現場でも、デバイス上で直接VPSマップの品質を確認できるため、再スキャンなどの手戻りを防ぎます。
- SDK向けのアウトプット最適化: Niantic Spatial SDK向けに最適化されたデータを出力し、空間情報を利用した体験を即座に構築できます。
※既存のScaniverseユーザーの体験に変更はありません。これまでのスキャンデータおよび共有機能は引き続き利用できます。また、今後も新機能が追加予定とのことです。
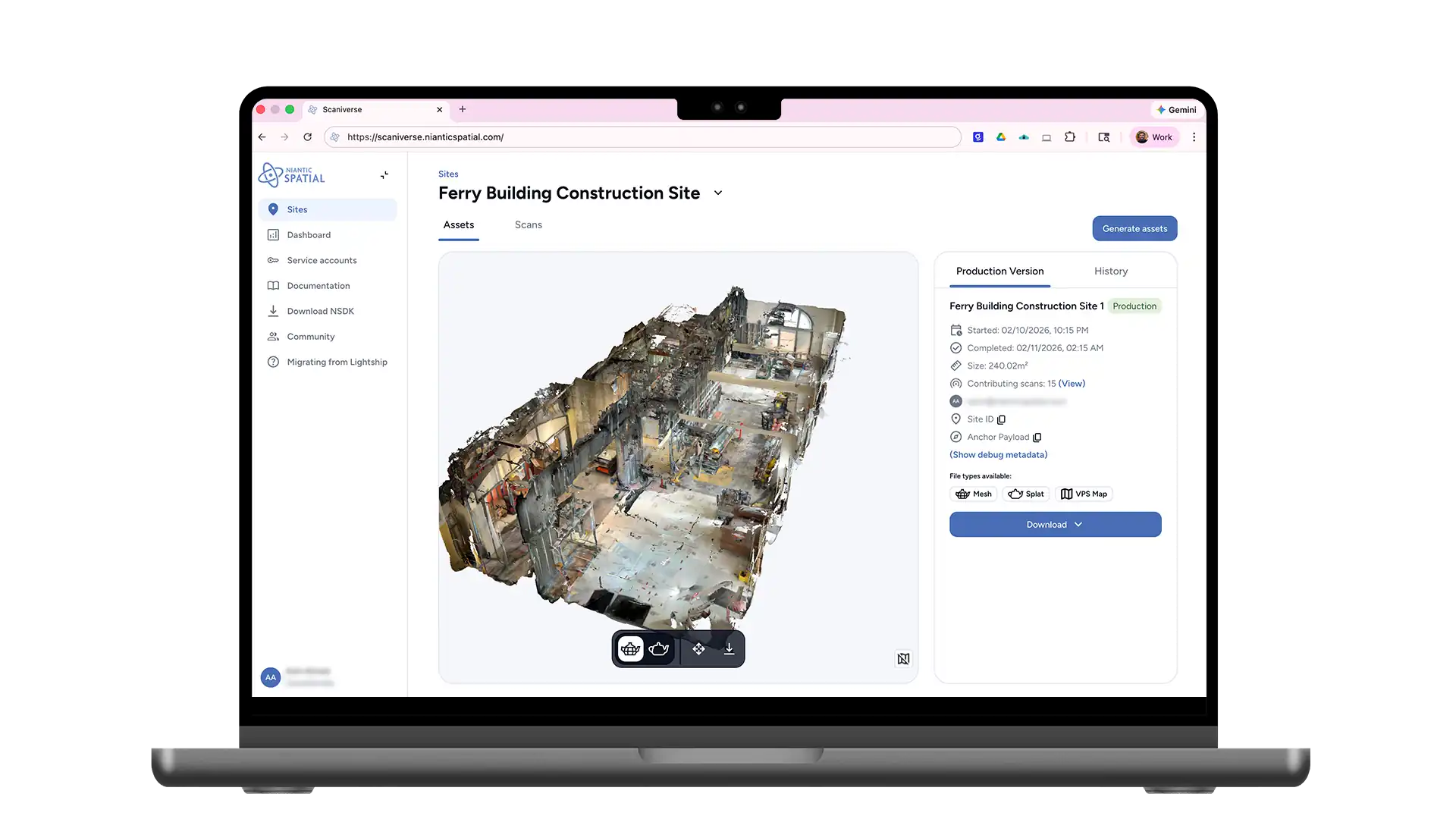
Webブラウザでの大規模処理とエクスポート
Webプラットフォーム(scaniverse.nianticspatial.com)では、組織をまたいだデータの管理や、より高度な処理が行えます。
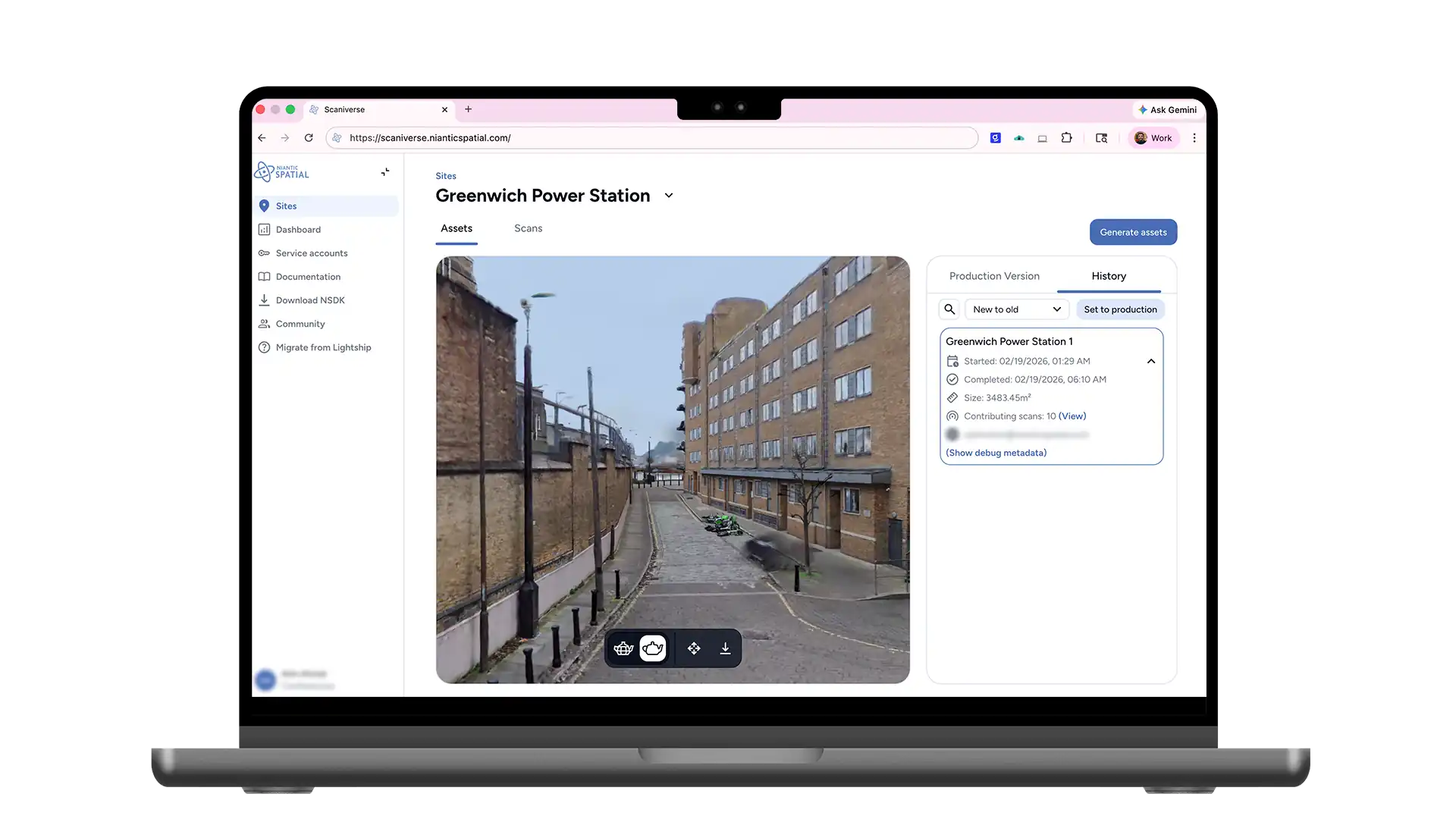
- 360度カメラ対応: 360度カメラの映像をアップロードし、建設現場や工場、市街地など広大で複雑なエリアをGaussian Splatsとして再構築できます。
- オープンフォーマットでの書き出し: 生成したアセットは、標準的な3D形式でエクスポート可能です。メッシュは「FBX」、Splatは「PLY」および業界標準となりつつあるオープンソース形式「SPZ」に対応しており、ロボットシミュレーター等へ直接インポートできます。
近日中に360度カメラ映像を用いたVPS(測位)サポートが追加されるほか、年内には新しいデータキャプチャ方式や追加フォーマットのサポートも予定されています。
VPS 2.0
GPSを超える次世代の自己位置推定
50 年以上前に開発された GPS は、都市の高層ビル群で信号が反射して誤差が生じたり、屋内や地下ではそもそも受信できなかったりと、現代の自律システムが求めるセンチメートル単位の精度には対応しきれていません。さらに、意図的な電波妨害(ジャミング)や、なりすまし(スプーフィング)といったリスクも高まっています。

Niantic Spatial の VPS 2.0 は、カメラの視覚情報と複数のデータソースを組み合わせ、GPS の弱点を補完・拡張する統合システムです。従来のように「事前スキャンが必須」という制約を取り払い、状況に応じて次の 2 つのモードをシームレスに切り替えます。
- 広域 3DoF モード(事前スキャン不要): 未スキャンエリアにおいて、GPSの誤差や消失を補正し、信頼性の高い位置と方向(ヘディング)を提供します。このモードは、2D地図や3D地形などの「ベースマップ」、モバイルや航空機からの「広域スキャンデータ」、そして加速度計・磁力計・リアルタイムビデオ・LIDARといった「デバイスレベルのセンサー入力」など、複数のデータソースを統合して機能します。
- 高精度 6DoF モード(スキャン済みエリア): Scaniverseで事前にマッピングされたエリアに入ると、自動的にセンチメートル精度の6自由度(完全な位置と姿勢)の特定へと移行します。
既存技術との比較:独自の柔軟性と堅牢性
GPS の弱点を補う従来の手法は、高価な専用ハードウェアに依存したり、環境の変化に弱かったりと、運用面での制約が多くありました。
VPS 2.0 は、ディープラーニングを中心としたアーキテクチャを採用し、冗長性と堅牢性を確保することで、より柔軟に運用できるシステムとして設計されています。
| 機能比較 | Niantic Spatial VPS | その他のシステム |
|---|---|---|
| データソース |
ディープラーニングにより、多様な2Dおよび3Dデータソースから位置推定が可能。 柔軟なインプット |
専用ソフトを用いた事前のマッピングや、閉鎖的な独自のデータセットを必要とする場合が多い。 閉鎖的エコシステム |
| 堅牢性 |
最先端の研究に裏打ちされた冗長なディープラーニングシステムにより、安定したパフォーマンスを確保。 全環境対応 |
照明や天候の変化に影響を受けやすい、従来型のコンピュータビジョン手法に頼ることが多い。 環境依存が強い |
| パイプラインのアウトプット |
自己位置推定マップと同時に、セマンティックな意味情報を持つ3Dデジタルツインを生成する。 多目的アウトプット |
位置特定のみを目的とした単一用途であることが多く、出力されるメッシュデータも限定的。 限定的な出力 |
対象となる業界とユースケース
Scaniverse と VPS 2.0 の統合は、現実空間で活動する幅広い企業や開発者の多様な取り組みを後押しします。
- ロボティクス(OEM・オペレーター): 屋内やGPSの届かない環境でも、配送ロボットや自律走行システムが自己位置を見失うことなくナビゲーションを継続。
- エネルギー・建設・物流: 複雑な現場を正確にマッピングし、ドローンの連携や作業員と機械が共通の空間モデルに基づいた点検・進行を実現。
- 公共セクター(ミッションクリティカル): GPSが妨害・遮断されるような環境下において、ミッション遂行に不可欠な位置情報を確保。
- 大規模施設での体験: 屋内から屋外まで、一貫した位置認識に基づくARアプリケーションやナビゲーションを提供。
多様な環境を繋ぐ統合SDK「NSDK 4.0」
これらの技術を既存のアプリケーションに組み込むための「NSDK 4.0 (Niantic Spatial Development Kit)」が、今月リリースされます。
NSDK 4.0は、ScaniverseとVPS 2.0に直接接続する「統合SDK」として機能します。これにより、Scaniverseで作成したプライベートなマップや3Dアセットを、開発者自身のアプリケーションに直接読み込み、VPS 2.0の測位機能と連携させることが可能になります。
サポート言語・環境は、Unity、Swift、Android(Native / Kotlin)といった主要なモバイルプラットフォームを網羅しています。さらに、今回のアップデートからロボット開発の標準OSである「ROS 2 (Robot Operating System 2)」の初期サポートも追加されました(※利用には要リクエスト)。
単一のプログラミング環境に縛られることなく既存のワークフローを活用できるため、開発者は高性能なスマートフォン向けARアプリから、複雑な自律制御を行うロボットシステムまで、幅広い空間アプリケーションを効率的に構築できます。
今後の展望
さらにNiantic Spatialは今年(2026年)後半に向けて、単なるナビゲーションや位置特定を超え、AIが空間内の物体や環境の意味(例えば「ここはドアである」「これは動く障害物である」など)を推論・理解する「セマンティックなシーン理解」を実現する空間基盤モデルの発表を予定しています。


コメント